


 Menu
Menu

The Jaguar is a powerful electric work class vehicle featuring Saab Seaeye's iCON™ intelligent control system.
The Jaguar is capable of operating at depths of 3000m With this depth range and its extensive tooling capability, the Jaguar is capable of working in a wide range of subsea work applications.

With Saab Seaeye's iCON™ intelligent control system, the Jaguar is smart and capable.

Designed with a dual power supply and two electronics pods, the Jaguar is effectively two vehicles in one providing total system redundancy.

Designed for work at depths of 3000m and fitted with a wide range of heavy duty tooling options.
The Jaguar power supplies are fitted into three floor-standing 19 inch racks and output the dual power supplies for the ROV, power for tooling options and power for the optional TMS.
Pilot Control Units include touch screens running the graphical user interface (GUI) for vehicle control, configuration and system diagnostic, Flight screen monitors that display data and video, which are transmitted via Fibre Optic multiplexers, surface control units for remote control of the PSUs, and a hand control unit for ROV.
Additional surface equipment options include TMS foot pedals for the optional TMS, hand control units for tooling options, and video recording options.
Available as a free swimming ROV or in conjunction with a Type 10 Tether Management System (TMS) for depths up to 3000 m.
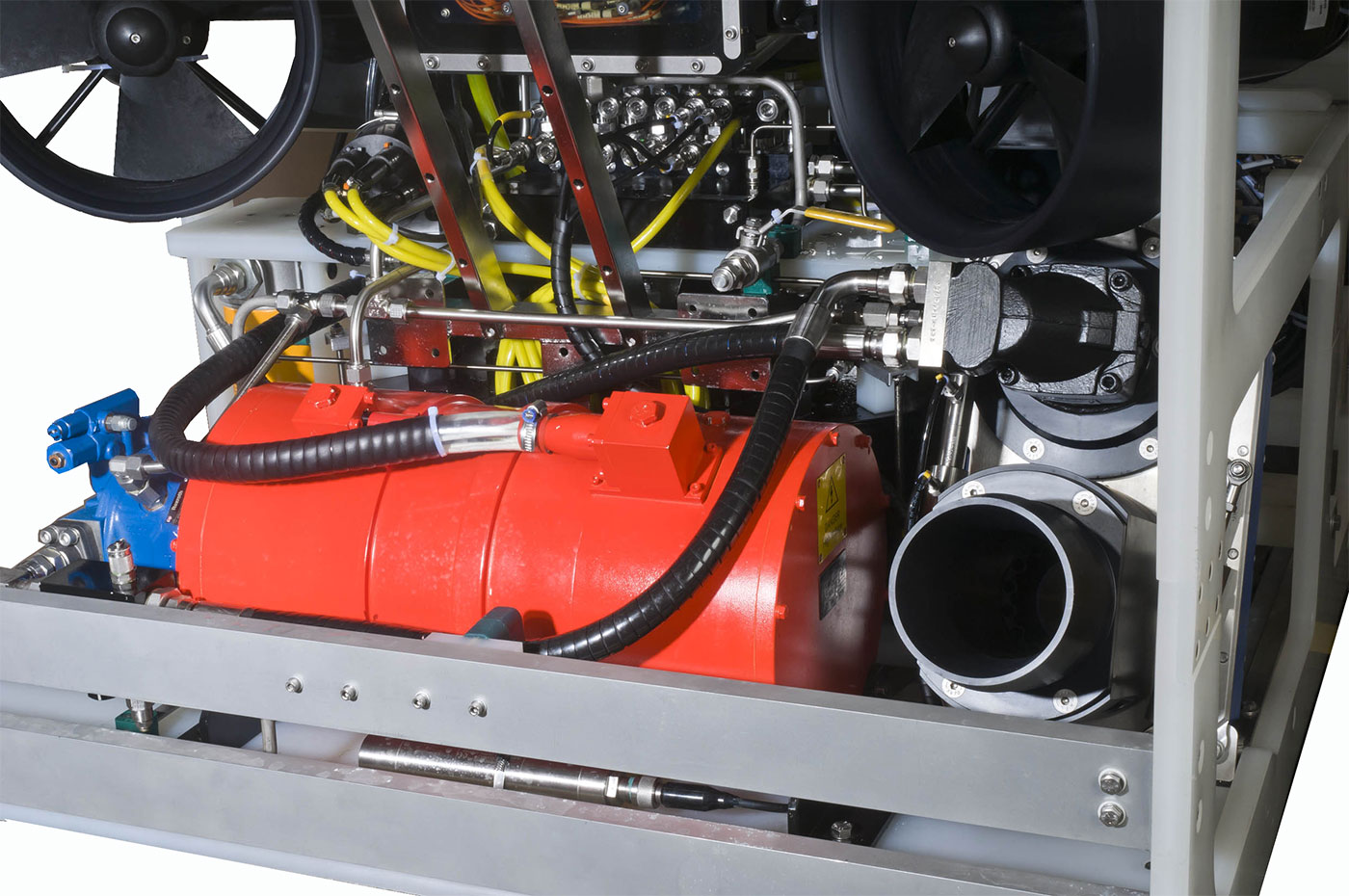
ROV rated to 3000m fitted with four horizontal SM8 thrusters and four vertical SM7 thrusters supplied with 500 Volts DC, two transformers, two electronics pods with fibre optic multiplexers, six LED lights on three channels, cameras, a depth sensor, and a compass pod with integrated Magneto-resistive compass, accelerometers and gyros with pitch and roll outputs for vehicle auto heading and auto depth. Auto altitude is available as an option when an altimeter is fitted.

Specification | Jaguar |
Depth Rating (msw) | 3000 |
Dimensions |
|
Length (mm) | 2200 |
Height (mm) | 1500 |
Width (mm) | 1325 |
Weight in air (kg) | 2100 |
Payload (kg) | 225 |
Thrust |
|
Forward (kgf) | 325 |
Lateral (kgf) | 290 |
Vertical (kgf) | 225 |
Speed (knots) | >3 |
Power |
|
Power input phases | 3 |
Voltage (VAC) | 380-480 |
Option | 690 |
Frequency (Hz) | 50-60 |
Battery Capacity (kWh) | N/A |
Endurance (km@2kts) | N/A |

Bathymetric system with depth sensor and altimeter. Ethernet options available.

Battery-operated, Xenon emergency strobe used to locate vehicle. (ST6K)

Cleaning brush incorporating a heavy duty brush plus an SM7 thruster motor.

Compact cutter capable of cutting 38 mm diameter steel wire rope. Includes an intensifier and requires a 4kW HPU.

Laser options for video survey.

High resolution colour or monochrome cameras fitted to either the front of the vehicle on tilt platform or on bracket at rear of vehicle. (CAM04)
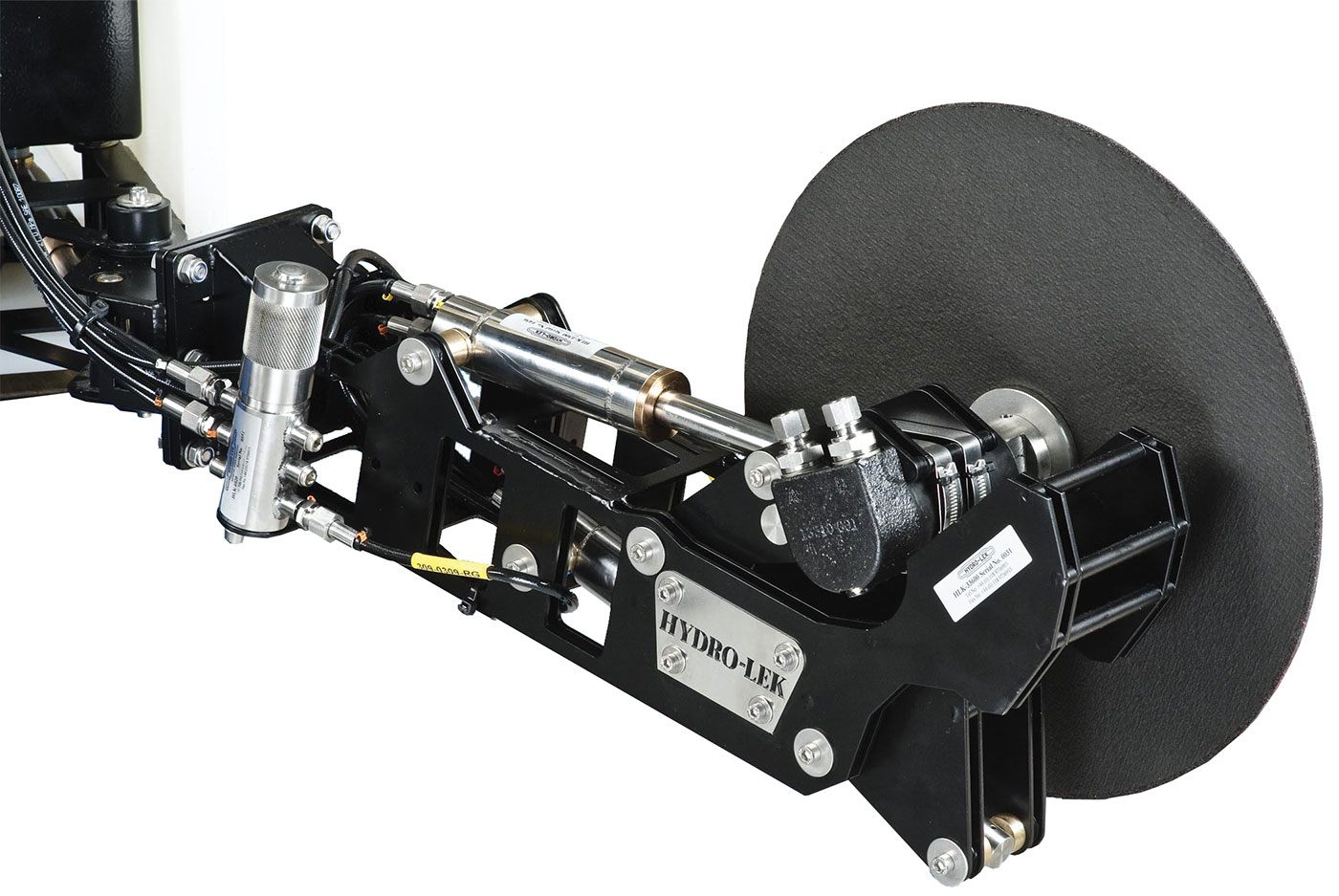
Rotary Cutter for hoses and cables up to 6 inches thick.

Additional three-phase power supply unit providing 3000 V at 50/60 Hz for hydraulic tooling options.
Additional three-phase power supply unit used for TMS equipped systems.
Control cabin options include video recording unit, video matrix switcher, communications system and high-back pilot seat.

Ultrasonic thickness gauge to determine the level of corrosion present in a structure.

Multibeam Sonar options with an integration kit and surface equipment. Ethernet options available for fibre optic vehicles.

Scanning Sonar options with an integration kit and surface equipment.

Altimeter used to measure the altitude of vehicle above sea floor. Auto altitude option available. (PA200)

High Definition Colour Zoom camera for vehicle. (OE14-366)

High Definition (HD) camera for vehicle. (OE14-502)

Pipeline survey skid fitted with TSS 440 pipe detection system and either a three or four-function camera boom arms. Various camera and LED light options available.
Dredge pump.
Hydraulic system for further tooling systems including 20kW, 3-phase 3000 V HPU, valve pack, and a compensator.
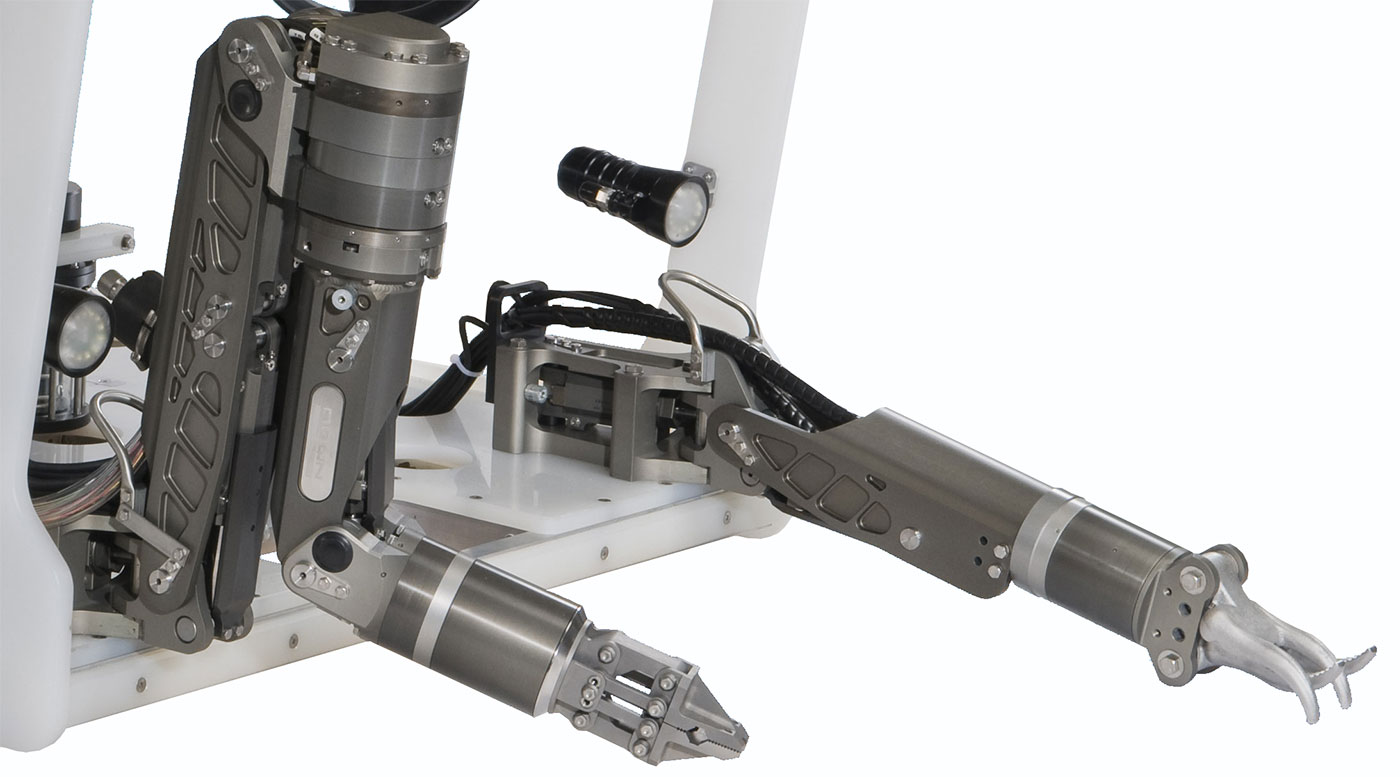
Schilling Orion 7P and 4R manipulator arm options with hydraulic system including 4.5kW HPU, valve pack, and a compensator. Camera option for manipulator available.

Complete acoustic tracking system used to calculate the position of the ROV with a fitted acoustic beacon.

Cathode Potential Probe with either contact or proximity probe options available.

Tether Management System (TMS) Type 10 with 500m capacity for a 22mm diameter single mode, fibre optic tether for the deployment and protection of the ROV at working depth. Height is adjustable to accommodate an ROV fitted with a tooling skid. Options include up to two cameras and two lights.

Additional cabin options include: 10 ft standalone workshop.
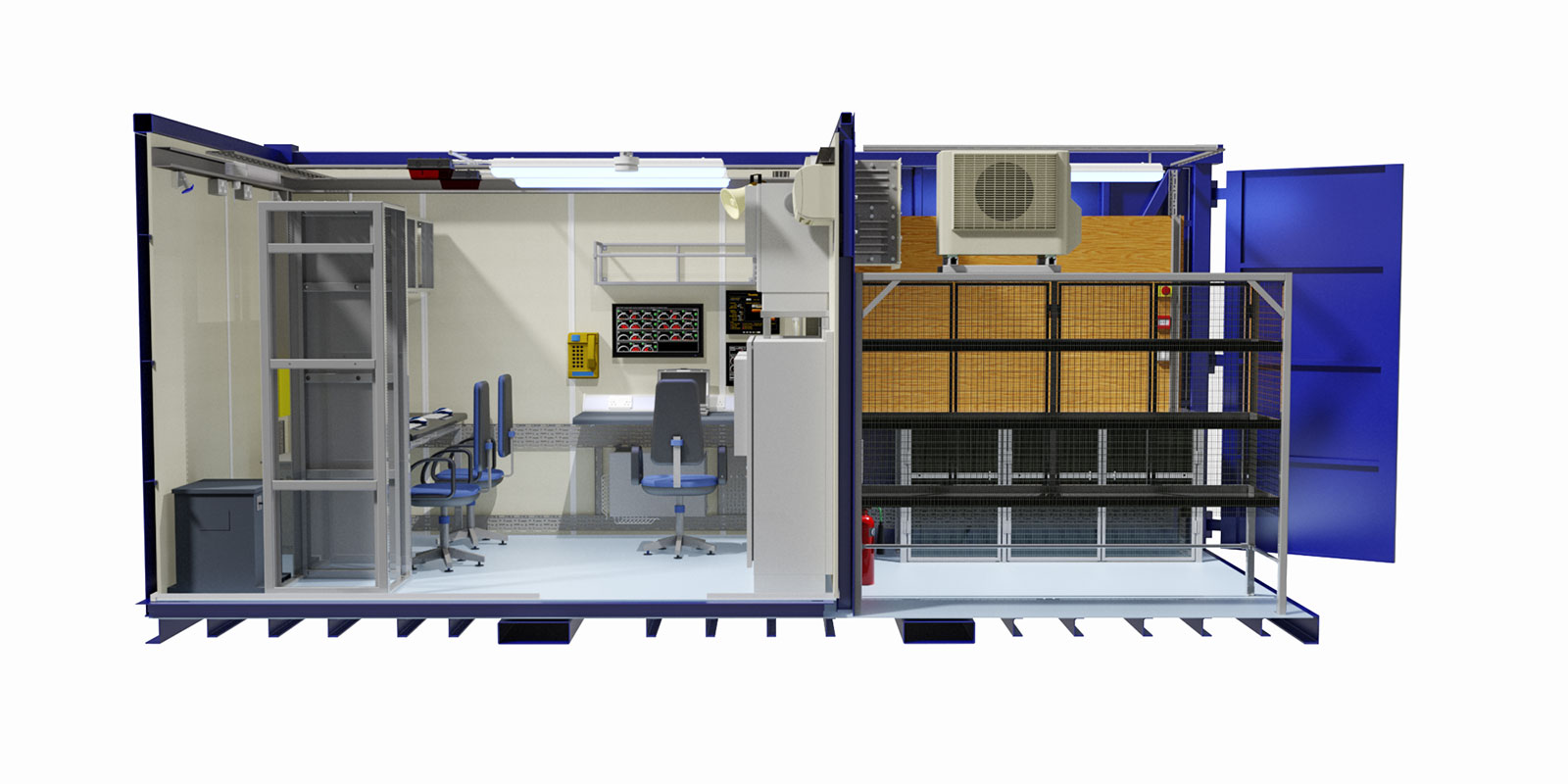
Safe Area 20ft split Control Cabin with a Pilot Control section and a separate high voltage PSU section. Fitted with electric power distribution panels, lighting, air conditioning, heating and 19 inch racks. An optional installed escape hatch is available as is a Zone II upgrade.
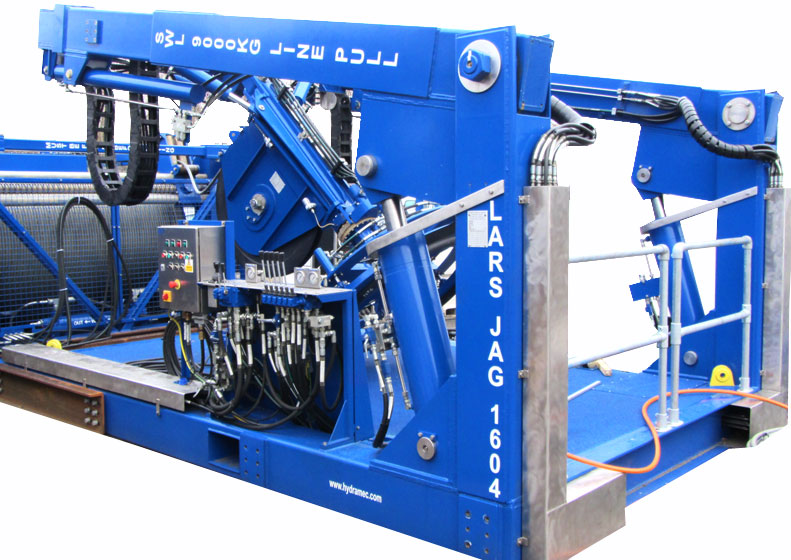
A-Frame Safe Area Launch and Recovery System (LARS) with varying winch capacities. A Zone II upgrade option is available.

 Twitter
Twitter Linkedin
Linkedin